


Robot İşletim Sistemi (ROS)
ROS Tanımı ve Önemi
- ● ROS (Robot Operating System), robotik uygulamalar geliştirmek için kullanılan bir açık kaynaklı yazılım platformudur. ROS, gerçek bir işletim sistemi olmayıp, sanki bir işletim sistemi gibi çalışarak, farklı donanım bileşenleri ve yazılım modülleri arasında paketlerin yönetimini sağlar. ROS, sensörlerden veri almak, bu verileri işlemek ve işlenen verilerin çıktılarına göre robotların kontrol edilmesini sağlar.
- ● Geliştirilen robotik sistemlerin standartları, üreticileri tarafından belirlenir. Robotlar her ne kadar benzer görevleri gerçekleştirse de her robotun kendi üreticisinin belirlediği standartları ve üreticisinin geliştirdiği yazılımlara bağlı kalınması gerekmektedir. Robot üreticileri arasında ortak bir standart olmamasından dolayı farklı marka robotları öğrenmekte bir zorluk meydana gelir. ROS, üreticiden ve geliştiriciden bağımsız bir standart yapının kullanılmasını sağlayarak bu zorluğun ortadan kaldırılmasını sağlar. Örneğin her endüstriyel robot markasının kendine özgün bir programlama sözdizimi (syntax) vardır ve her markanın kendi programlama sözdiminin öğrenilmesi gerekir. ROS Sürücü (Driver) desteği sağlayan endüstriyel robot markalarında ROS için geliştirilen Moveit yazılımı kullanarak ortak bir standart yakalanır. Moveit yazılımı sayesinde, farklı robot markaları için aynı standart yapı kullanılarak yörünge planlama algoritmaları geliştirilebilmektedir. Böylelikle ROS’un sağladığı bu standart yapı sayesinde farklı robot markalarıyla beraber projeler geliştirilmesine olanak sağlar.
ROS Çalışma Prensibi ve Mimarisi
ROS Paketlerinin Haberleşmesi
- 1.Node: ROS'ta, farklı fonksiyonları yerine getiren bağımsız çalışan programlara node denir. ROS, node aracılığıyla paketlerin haberleşmesini sağlar, böylece robot üzerindeki farklı donanımlar birbirlerine veriler gönderip, alabilir. Örneğin, bir node kameradan görüntü alırken, başka bir node kameradan alınan bu görüntüyü işleyebilir. Farklı bir node ise motorlardan pozisyon, hız, ivme verilerini alırken aynı zamanda başka bir node ise bu verileri kullanarak robotun kontrol algoritmasını yürütebilir. Bu yazılımın daha modüler bir yapıda çalışmasını sağlar.
- 2.Topic: Node’lar arasındaki veri alışverişi topic aracılığıyla yapılır. Bir node bir topic'e veri gönderebilirken, başka bir node ise o topic'ten veri alabilir.
- 3.Service: Bir node, başka bir node'a belirli bir işlem yapmasını istemek için bir servis çağrısında bulunabilir. Servisler, genellikle bir seferlik işlemler için kullanılır.
- 4.Message: Node'lar arasında iletilen veri paketleridir. Her bir message belirli bir yapıya sahiptir ve farklı veri tiplerini içerebilir.
- 5.Bag File: ROS'ta, robot sensörlerinden gelen verilerin kaydedilmesi ve daha sonra analiz edilmesi için kullanılan dosya formatıdır.
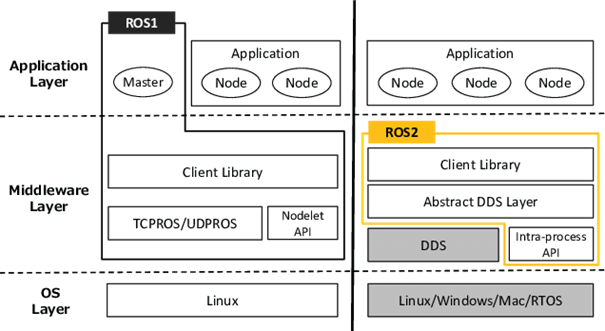
ROS1 ve ROS2 Mimarisinin Arasındaki Farklar
ROS 2, ROS 1'in bir sonraki versiyonu olarak geliştirilmiştir. Gerçek zamanlı işlemler, daha iyi güvenlik, dağıtılmış sistemler ve daha kararlı iletişim protokolleri sunar. ROS 2, özellikle endüstriyel uygulamalar ve kritik görevler için optimize edilmiştir. ROS 2 temelde ROS 1’in eksikliklerini ve açıklarını gidermek amacıyla geliştirilmiştir. ROS mimarisinde paketlerin birbiriyle haberleşmesi için TCP/IP bağlantısı kullanılmaktadır. ROS2 mimarisinde haberleşme için dağıtık sistemlerde sıklıkla ara katman için kullanılan DDS eklenmiştir.
- 1. DDS:
-
- ● ROS1: Merkezi bir master node'a dayanır. Bu node, diğer bütün node'ların birbirleriyle iletişim kurmasını sağlamaktadır. Bu, oluşan bir problemin sistemin bütününü bozmasını engellemektedir.
- ● ROS2: DDS (Data Distribution Service) temelli dağıtık daha modern bir iletişim modeli kullanmaktadır. Bu sayede merkezi bir node’a gerek kalmaz ve sistemi daha güvenilir kılmaktadır.
- ● ROS1: Merkezi bir master node'a dayanır. Bu node, diğer bütün node'ların birbirleriyle iletişim kurmasını sağlamaktadır. Bu, oluşan bir problemin sistemin bütününü bozmasını engellemektedir.
- 2. Gerçek Zamanlı Destek:
-
- ● ROS1: Gerçek zamanlı uygulamalar için tasarlanmamıştır ve bu tür uygulamalarda yetersiz kalmaktadır.
- ● ROS2: Gerçek zamanlı uygulamaları desteklemek amacıyla, düşük gecikme süreleri ve kesin zamanlama kontrolü sunmaktadır.
- ● ROS1: Gerçek zamanlı uygulamalar için tasarlanmamıştır ve bu tür uygulamalarda yetersiz kalmaktadır.
- 3. İşletim Sistemi Desteği:
-
- ● ROS1: Daha çok Linux işletim sistemi için optimize edilmiştir ve diğer platformlar için sınırlı destek sunmaktadır.
- ● ROS2: Çok platformlu destek sunar. Temelde Linux işletim sisteminde çalışmakla birlikte Windows ve macOS gibi farklı işletim sistemlerinde sanallaştırma teknolojisi ile kullanımı sağlanmaktadıır.
- ● ROS1: Daha çok Linux işletim sistemi için optimize edilmiştir ve diğer platformlar için sınırlı destek sunmaktadır.
- 4. Güvenlik:
-
- ● ROS1: Yerleşik bir güvenlik desteği bulunmaz. Güvenlik için ek yapılandırmalar ve önlemler almak gerekir.
- ● ROS2: DDS'in yerleşik güvenlik özelliklerinden yararlanarak daha güvenli bir iletişim sağlar.
- ● ROS1: Yerleşik bir güvenlik desteği bulunmaz. Güvenlik için ek yapılandırmalar ve önlemler almak gerekir.
- 5. API Değişiklikleri:
-
- ● ROS1: Daha eski ve bazı eksiklikleri bulunan API’lere ve kütüphanelere sahiptir.
- ● ROS2: ROS1'e kıyasla farklılıklar gösteren ve iyileştirilmiş API’ler ve kütüphaneler sunar. Ancak, bu da ROS1’den ROS2’ye geçişi zorlaştırabilir.
- ● ROS1: Daha eski ve bazı eksiklikleri bulunan API’lere ve kütüphanelere sahiptir.
- 6. Topluluk ve Destek:
-
- ● ROS1: Daha uzun süredir var olan ve geniş bir kullanıcı kitlesi olan bir sistemdir, bu yüzden daha fazla kaynak ve destek bulunabilir.
- ● ROS2: Yeni olmasına rağmen hızla büyüyen bir topluluğa sahiptir ve ROS1'e göre daha modern ihtiyaçlara yönelik geliştirilmiştir.
- ● ROS1: Daha uzun süredir var olan ve geniş bir kullanıcı kitlesi olan bir sistemdir, bu yüzden daha fazla kaynak ve destek bulunabilir.
ROS Ekosistemi: Temel Araçlar ve Bileşenler
ROS ekosistemi, robotik projeleri geliştirmek, test etmek ve dağıtmak için geniş bir yazılım paketi yelpazesi sunar. Bu ekosistem, robotik yazılımların geliştirilmesini kolaylaştırmak, hızlandırmak ve daha güvenilir hale getirmek için tasarlanmıştır.
ROS'un belirli bir sürümü, belirli araçlar ve kütüphanelerle birlikte gelir. Her ROS dağıtımı, uzun vadeli destekle (LTS) gelir ve farklı platformlar için optimize edilmiştir.
Örneğin: ROS Melodic, ROS Noetic, ROS 2 Foxy, ROS2 Humble.
- 1. RVIZ: Robotların sensör verilerini ve ortamdan gelen bilgileri görselleştirmek için kullanılan bir araçtır. RVIZ ile robotların gerçek zamanlı olarak robot ve sensörlerden alınan verileri görselleştirerek, 3B bir model oluşturulur. Örneğin, lidar tarayıcıdan alınan verileri, kameradan alınan görüntüleri ve robotun pozisyonu 3B olarak RVIZ ortamında görselleştirilir.
- 2. GAZEBO: Robotların fiziksel dünyada nasıl hareket edeceğini ve nasıl etkileşimde bulunacağını modellemek için kullanılan güçlü bir simülasyon aracıdır. ROS ile entegre çalışarak, fiziksel bir robot olmadan geliştirilen yazılımların test edilmesine olanak sağlar. GAZEBO, fizik motoru, sensör simülasyonu ve 3D modelleme desteğiyle fiziksel robotların hareketleri modellenmektedir.
- 3. MoveIt: Genelde robotik manipülatörler için hareket planlama, kinematik hesaplama, çarpışma önleme ve tekillik tespiti gibi özellikleri sağlayan bir ROS kütüphanesidir. Endüstriyel robotlar için son derece faydalı bir kütüphanedir.
- 4. rosbag: ROS'ta verilerin kaydedilmesi ve daha sonra yeniden oynatılması için kullanılan bir araçtır. Özellikle sensör verilerinin kaydedilmesi ve analiz edilmesi için çok faydalıdır. Rosbag dosyaları, kaydedilen verilerin aktarılmasında kolaylık sağlar.
- 5. tf: ROS'ta farklı koordinat sistemleri arasında dönüşüm yapmayı sağlayan bir kütüphanedir. Robotun eklemleri, kamera, sensörler ve dünya koordinat sistemi arasındaki dönüşümleri görselleştirmektedir. Örneğin, bir robotun kolu, kamerası ve dünyadaki konumu arasındaki dönüşümleri hesaplamak için faydalıdır.
- 6. rqt: ROS için modüler bir GUI aracıdır. Rviz, rosbag, ve diğer araçların özelliklerini birleştirerek kullanıcı dostu bir arayüz sunar. rqt'nin birçok eklentisi vardır, bu sayede robotik sistemlerin analizinde kolaylık sağlamaktadır.
- 7. Navigation Stack: Mobil robotların haritalama, lokalizasyon, ve yol planlama yapmasını sağlayan bir yazılım kütüphanesidir. Bu paketin, robotun bulunduğu ortamda güvenli bir şekilde hareket etmesine olanak tanımaktadır. AMCL (Adaptive Monte Carlo Localization) ve Dijkstra gibi algoritmaları içermektedir.
Bu yazılım kütüphaneleri ve paketleri, ROS ekosisteminin temel yapı taşlarını oluşturarak robotik sistemlerin hızlı, verimli ve modüler bir şekilde prototiplemesinde kritik bir fayda sağlar.
ROS’un Fonksiyonel Özellikleri ve Uygulamaları
ROS, robotik sistemlerin geliştirilmesi, yönetimi ve entegrasyonu için kullanılan bir platformdur. ROS’un sunduğu genel görevler, robotların çeşitli uygulamalarda etkili ve verimli bir şekilde çalışmasını sağlar. Bu görevler, robotların hareketinden sensör verilerinin işlenmesine, otonom davranışlardan veri iletişimine kadar geniş bir yelpazeyi kapsar:
- 1. Hareket Planlama ve Kontrol:
-
- ● Kinematik ve Dinamik Hesaplamalar: ROS, robotların eklemlerinin ve gövdelerinin pozisyonlarını belirlemek için ileri ve ters kinematik hesaplamaları yapar. Bu, robotun hedef pozisyona hassas bir şekilde doğru koordinatlarda ve açılarda bir şekilde ulaşmasını sağlar.
- ● Yol Planlama: MoveIt gibi yazılım paketleri, robotların engellerden kaçınarak belirli bir hedefe ulaşmaları için optimum yolların hesaplanmasını sağlar.
- ● Gerçek Zamanlı Kontrol: ROS2, robotların motorları ve aktüatörleri üzerinde gerçek zamanlı kontrol sağlar. Bu, robotların hassas hareketler yapmasına ve görevlerini tam olarak yerine getirmesine olanak tanır.
- ● Kinematik ve Dinamik Hesaplamalar: ROS, robotların eklemlerinin ve gövdelerinin pozisyonlarını belirlemek için ileri ve ters kinematik hesaplamaları yapar. Bu, robotun hedef pozisyona hassas bir şekilde doğru koordinatlarda ve açılarda bir şekilde ulaşmasını sağlar.
- 2. Sensör Verilerinin İşlenmesi ve Algılama:
-
- ● Verilerin İşlenmesi: ROS, LIDAR, kamera, radar, IMU gibi çeşitli sensörlerden gelen verileri toplar ve işler. Bu veriler, robotun çevresini algılaması ve kararlar alması için temel oluşturur.
- ● Haritalama: SLAM (Simultaneous Localization and Mapping) gibi algoritmalar, robotların çevrelerinin haritasını oluştururken aynı zamanda kendi konumlarını belirlemelerine olanak tanır.
- ● Nesne Tanıma ve Takip: ROS, OpenCV gibi görüntü işleme kütüphaneleri ile entegre edilerek nesne tanıma, takibi ve sınıflandırma görevlerini yerine getirir. Bu, robotların otonom kararlar almasını ve bulunduğu ortamları anlamlandırmasını sağlar.
- ● Verilerin İşlenmesi: ROS, LIDAR, kamera, radar, IMU gibi çeşitli sensörlerden gelen verileri toplar ve işler. Bu veriler, robotun çevresini algılaması ve kararlar alması için temel oluşturur.
- 3. Otonom Navigasyon:
-
- ● Yerelleştirme: AMCL (Adaptive Monte Carlo Localization) gibi algoritmalar, robotların bilinen bir harita üzerinde kendi konumlarını belirlemelerini sağlar.
- ● Yol Bulma: ROS, robotların hedefe ulaşmak için engellerden kaçınarak en uygun yolu bulmalarını sağlar. Bu, özellikle otonom mobil robotlar (AMR) için önemlidir.
- ● Dinamik Ortamlarda Hareket: ROS, robotların dinamik ortamlarda, yani insanlar ve diğer hareketli nesnelerin bulunduğu ortamlarda, güvenli ve verimli bir şekilde hareket etmelerini sağlar.
- ● Yerelleştirme: AMCL (Adaptive Monte Carlo Localization) gibi algoritmalar, robotların bilinen bir harita üzerinde kendi konumlarını belirlemelerini sağlar.
- 4. Robotlar Arası İletişim ve Koordinasyon:
-
- ● Çoklu Robot Sistemleri: ROS, birden fazla robotun birlikte çalışmasını sağlayacak şekilde yapılandırılabilir. Bu robotlar, görev paylaşımı ve koordinasyon yaparak daha karmaşık görevleri yerine getirebilirler.
- ● Veri Paylaşımı: ROS, robotlar arasında veri paylaşımını ve iş birliğini kolaylaştırır. Örneğin, bir robotun elde ettiği harita verileri diğer robotlar tarafından da kullanılabilir.
- ● Çoklu Robot Sistemleri: ROS, birden fazla robotun birlikte çalışmasını sağlayacak şekilde yapılandırılabilir. Bu robotlar, görev paylaşımı ve koordinasyon yaparak daha karmaşık görevleri yerine getirebilirler.
- 5. Simülasyon ve Test:
-
- ● Fiziksel Simülasyon: Gazebo gibi araçlar, robotların fiziksel dünyada nasıl davranacaklarını simüle eder. Bu, geliştirme sürecinde robotların sanal ortamda test edilmesine olanak tanır.
- ● Robot Modellerinin Testi: ROS, robot modellerinin ve yazılımlarının simülasyon ortamında test edilmesini sağlar, böylece fiziksel robot üzerinde yapılan testlerden önce hataların tespit edilmesini mümkün kılar.
- ● Fiziksel Simülasyon: Gazebo gibi araçlar, robotların fiziksel dünyada nasıl davranacaklarını simüle eder. Bu, geliştirme sürecinde robotların sanal ortamda test edilmesine olanak tanır.
- 6. Veri Toplama ve Analiz:
-
- ● Veri Toplama: ROS, robotların çalışması sırasında meydana gelen tüm verileri kaydedebilir. Bu veriler, analiz edilerek sistemin performansı değerlendirilebilir ve olası iyileştirmeler yapılabilir.
- ● Gerçek Zamanlı İzleme: ROS, sensör verilerini ve robotun durumunu gerçek zamanlı olarak izleyip analiz eder. Bu, geliştiricilerin sistemi optimize etmelerine ve anlık müdahalelerde bulunmalarına olanak tanır.
- ● Veri Toplama: ROS, robotların çalışması sırasında meydana gelen tüm verileri kaydedebilir. Bu veriler, analiz edilerek sistemin performansı değerlendirilebilir ve olası iyileştirmeler yapılabilir.
- 7. Yapay Zekâ ve Makine Öğrenimi Entegrasyonu:
-
- ● Akıllı Karar Alma: ROS, yapay zekâ ve makine öğrenimi algoritmalarını entegre ederek robotların karmaşık kararlar almasını sağlar. Bu, özellikle otonom robotlar ve ileri seviye otomasyon uygulamaları için önemlidir.
- ● Öğrenme Algoritmaları: Robotlar, ROS sayesinde geçmiş deneyimlerinden öğrenebilir ve gelecekteki görevlerde daha verimli çalışabilir.
- ● Akıllı Karar Alma: ROS, yapay zekâ ve makine öğrenimi algoritmalarını entegre ederek robotların karmaşık kararlar almasını sağlar. Bu, özellikle otonom robotlar ve ileri seviye otomasyon uygulamaları için önemlidir.
- 8. Veri İletişimi ve Protokol Yönetimi:
-
- ● Mesajlaşma Sistemi: ROS, düğümler arası iletişimi sağlayan bir mesajlaşma sistemine sahiptir. Bu, robotun farklı bileşenleri arasında veri paylaşımını ve koordinasyonu kolaylaştırır.
- ● Endüstriyel Protokollerle Entegrasyon: ROS, endüstriyel iletişim protokolleriyle (örneğin, CAN Bus, EtherCAT) entegre olarak çalışabilir. Bu, ROS’un endüstriyel otomasyon sistemleriyle uyumlu olmasını sağlar.
- ● Mesajlaşma Sistemi: ROS, düğümler arası iletişimi sağlayan bir mesajlaşma sistemine sahiptir. Bu, robotun farklı bileşenleri arasında veri paylaşımını ve koordinasyonu kolaylaştırır.
Bu genel görevler, ROS’un robotik sistemlerde geniş bir yelpazede kullanılmasına olanak tanır. ROS, esnek ve modüler yapısı sayesinde hem araştırma projelerinde hem de endüstriyel uygulamalarda kritik bir rol oynar.
ROS Kullanım Alanları
ROS, robotik uygulamalar geliştirmek için kullanılan çok yönlü bir platformdur ve çeşitli endüstrilerde, araştırma alanlarında ve akademik çalışmalarında geniş bir kullanım yelpazesine sahiptir. ROS'un başlıca yaygın kullanım alanları:
- 1. Mobil Robotlar:
-
- ● Otonom Navigasyon: ROS, mobil robotların ortamda haritalama yapmasını, yol bulmasını ve otonom olarak hareket etmesini sağlamak için kullanılır. Bu, lojistik depolarda kullanılan otonom taşıma robotları, otonom yer temizleme robotları ve tarımda kullanılan otonom araçlar gibi uygulamalarda yaygındır.
- ● Drone'lar ve İnsansız Hava Araçları (UAV): ROS, drone'ların uçuş kontrolü, navigasyon, engel algılama ve haritalama gibi görevlerde kullanılır. Bu uygulamalar, tarım, lojistik hizmetleri, çevre izleme ve afet yönetiminde yaygın olarak kullanılmaktadır.
- ● Otonom Navigasyon: ROS, mobil robotların ortamda haritalama yapmasını, yol bulmasını ve otonom olarak hareket etmesini sağlamak için kullanılır. Bu, lojistik depolarda kullanılan otonom taşıma robotları, otonom yer temizleme robotları ve tarımda kullanılan otonom araçlar gibi uygulamalarda yaygındır.
- 2. Endüstriyel Robotlar:
-
- ● Robotik Manipülatör: ROS, endüstriyel robot kollarının kontrolü, yörünge planlaması ve koordinasyonu için kullanılır. Otomotiv üretimi, elektronik montaj ve paketleme gibi alanlarda kullanılır. İnsanlarla birlikte çalışan, işbirlikçi robotların kontrolünde de yaygınlıkla ROS kullanılmaktadır. Bu robotlar, montaj hatlarında, kalite kontrol ve hassas üretim süreçlerinde yer alır.
- 3. Tarım Teknolojileri:
-
- ● Otonom Tarım Makineleri: ROS, ekim, hasat ve bitki bakımında kullanılan otonom tarım makinelerinde yaygın olarak kullanılır. Bu makineler, GPS ve çeşitli sensörler aracılığıyla arazi içindeki hareketlerini koordine etmektedir.
- ● Tarımsal Robotlar: Bitki analizi, yabancı ot tespiti ve zararlı kontrolü gibi görevler için robotlar, ROS kullanarak geliştirilmektedir.
- ● Otonom Tarım Makineleri: ROS, ekim, hasat ve bitki bakımında kullanılan otonom tarım makinelerinde yaygın olarak kullanılır. Bu makineler, GPS ve çeşitli sensörler aracılığıyla arazi içindeki hareketlerini koordine etmektedir.
- 4. Savunma ve Güvenlik:
-
- ● İnsansız Kara Araçları (UGV): ROS, keşif, mayın temizleme ve lojistik destek gibi askeri görevlerde kullanılan insansız kara araçlarının geliştirilmesinde kullanılır.
- ● Güvenlik Robotları: ROS, güvenlik izleme, devriye ve tehlike tespiti gibi görevlerde dört bacaklı robotlarda yaygınlıkla kullanılmaktadır.
- ● İnsansız Kara Araçları (UGV): ROS, keşif, mayın temizleme ve lojistik destek gibi askeri görevlerde kullanılan insansız kara araçlarının geliştirilmesinde kullanılır.
- 5. Otonom Araçlar:
-
- ● Otonom Taşıtlar: ROS, otonom sürüş sistemlerinin geliştirilmesinde kullanılır. Sensör verilerinin işlenmesi, yol bulma, engel algılama ve karar verme süreçlerinde ROS araçları yaygın olarak tercih edilmektedir..
- ● Lojistik Robotları: ROS, lojistik depolarda kullanılan otonom araçlar ve robotlar için kullanılır. Bu araçlar, depolama ve taşıma işlemlerini otonom olarak gerçekleştirir.
- ● Otonom Taşıtlar: ROS, otonom sürüş sistemlerinin geliştirilmesinde kullanılır. Sensör verilerinin işlenmesi, yol bulma, engel algılama ve karar verme süreçlerinde ROS araçları yaygın olarak tercih edilmektedir..
- 6. Denizaltı ve Denizüstü Robotları:
-
- ● Otonom Deniz Araçları (AUV/ASV): ROS, su altı ve yüzey araştırmaları için kullanılan otonom deniz araçlarının kontrolünde kullanılır. Bu araçlar, okyanus araştırmaları, su kalitesi izleme ve denizaltı haritalama gibi görevlerde yer alır.
- ● Sualtı Robotlar: ROS, sualtı inceleme, kurtarma operasyonları ve su altı yapı bakımı gibi görevler için robotların kontrolünü sağlar.
- ● Otonom Deniz Araçları (AUV/ASV): ROS, su altı ve yüzey araştırmaları için kullanılan otonom deniz araçlarının kontrolünde kullanılır. Bu araçlar, okyanus araştırmaları, su kalitesi izleme ve denizaltı haritalama gibi görevlerde yer alır.
- 7. Araştırma ve Akademik Çalışmalar:
-
- ● Robotik Araştırmalar: ROS, akademik kurumlarda robotik alanındaki araştırmalar için yaygın olarak kullanılır. Bu, yeni algoritmaların geliştirilmesi, robotik kontrol sistemlerinin test edilmesi ve simülasyonların yürütülmesini içerir. Akademi için geliştirilen teorik çalışmalarda özellikle işbirlikçi robotlar sıklıkla kullanılmaktadır. Açık kaynak bu konuda çok büyük avantaj sağlamaktadır.
ROS'un çok yönlülüğü, farklı sensör ve aktüatörlerle entegre olabilmesi ve geniş topluluk desteği sayesinde, robotik projeler geliştiren herkesin kullanabileceği güçlü bir araç haline gelmiştir.
ROS’un Kullanımının Avantajları:
ROS, robotik alanında önemli bir devrim yaratarak robot geliştirme süreçlerini hızlandırmış ve herkes tarafından kolaylıkla ve ücretsiz bir şekilde erişilebilir hale getirmiştir. ROS belli kriterler sağlamaktadır:
- 1. Standartlaştırma ve Modülerlik:
ROS, robotik yazılımlar için bir standart platform sunarak, farklı robotların ve bileşenlerin bir arada çalışabilmesini sağlamıştır. Bu, farklı robot grupları ve markalar arasında işbirliğini kolaylaştırır. ROS, modüler bir yapıya sahip olduğundan, geliştiriciler farklı bileşenleri kolayca ekleyip çıkarılabilmektedir. Bu, esneklik ve ölçeklenebilirlik sağlar, böylece küçük prototiplerden büyük endüstriyel robotlara kadar her türlü robotik sistemin geliştirilmesi mümkün olmaktadır.
- 2. Açık Kaynak ve Topluluk Desteği:
ROS'un açık kaynaklı olması, dünya çapında büyük bir kullanıcı ve geliştirici topluluğunun oluşmasına olanak tanımıştır. Bu topluluk, sürekli olarak yeni kütüphaneler, araçlar ve güncellemeler sunar, bu da ROS'un sürekli gelişmesini sağlar. Geniş bir topluluğa sahip olması, geliştiricilerin karşılaştıkları sorunlara hızlıca çözüm bulabilmelerini ve en hatasız uygulamalara erişim sağlamalarını mümkün kılar. Ayrıca, yeni araştırmalar ve teknolojiler ROS kullanılarak yayınlanabilir. Geliştirilen donanımların ROS için sürücü destekleri her geçen gün yaygınlaşmaktadır.
- 3. Endüstride Yaygın Kullanım Alanı:
ROS, robotik sistemlerin hızlı bir şekilde prototiplenmesine olanak tanır. Bu, özellikle startup'lar ve AR-GE odaklı şirketler için büyük bir avantajdır, çünkü yeni fikirleri hızla test edebilir ve pazara sunabilirler. Aynı zamanda ROS, endüstriyel robotların kontrolünde de yaygın olarak kullanılmaktadır. Endüstri 4.0 ve akıllı fabrikalar gibi konseptlerde ROS'un rolü giderek artmaktadır. Endüstriyel robotlar, ROS'un esnekliği ve geniş araç desteği sayesinde daha akıllı ve daha verimli hale gelmektedir.
- 4. Simülasyon ve Dijital İkiz Teknolojisi:
ROS, Gazebo ve RVIZ gibi hem canlı hem simülasyon ortamları sunar. Bu, endüstriyel süreçlerin sanal bir ortamda test edilmesine ve optimize edilmesine olanak tanır. Dijital ikiz teknolojisi sayesinde projeyi gerçekleştirmeden ortaya çıkacak problemlerin önceden belirlenmesini sağlayarak pahalı donanım maliyetlerinde avantaj sağlar.
Robotik Alanındaki Önemi ve Geleceği
- ● ROS, gelecekte otonom araçlar, endüstriyel otomasyon ve insansız sistemler için daha da önemli bir rol oynayacaktır. Yapay zeka (AI) ve makine öğrenimi algoritmaları, ROS ile entegre edilerek, robotların çevrelerini daha iyi anlamalarına ve daha karmaşık görevleri otonom olarak yerine getirmelerine olanak tanımaktadır. Bu entegrasyon, gelecekte daha akıllı ve yetenekli robotların geliştirilmesinde büyük katkı sunacaktır.
- ● ROS'un bulut tabanlı yazılımlar ile entegrasyonu, robotların yeteneklerini arttırmaktadır. Bulut tabanlı sistemler, birden çok robotun kullanıldığı durumlarda donanımların kapasitelerinin artmasına, yoğun hesaplamaların gerçekleştirilmesine katkı sağlamaktadır.
- ● Gelecekte, ROS'un otonom araçlar, dronlar ve denizaltı robotlar gibi otonom sistemlerdeki rolü artacaktır. Bu sistemlerin birbirleriyle ve insanlarla güvenli ve etkili bir şekilde etkileşimde bulunabilmesi için ROS kritik bir rol oynayacaktır.
- ● ROS, küresel bir robotik ekosistemi oluşturulmasında kritik bir rol oynamaktadır. Açık kaynaklı olması, şirketlerin, akademisyenlerin ve bağımsız geliştiricilerin birlikte çalışarak daha hızlı ilerlemeler kaydetmelerine olanak tanımaktadır.
- ● ROS'un standartları ve araçları, farklı robotik platformların ve bileşenlerin uyumlu bir şekilde çalışmasını sağlar. Bu, gelecekte daha karmaşık ve entegre robotik sistemlerin gelişmesinde öncülük edebilir.
- ● ROS, robotik alanındaki önemi ile günümüz teknolojilerini şekillendirmekte beraber hem de geleceğin robotik dünyasına yön vermektedir. Özellikle ROS 2'nin gelişimi ve AI, bulut bilişim gibi ileri teknolojilerle entegrasyonu, ROS'un gelecekteki kullanımı daha da yaygınlaştıracaktır. Robotik sistemlerin daha akıllı, daha erişilebilir ve daha yaygın hale gelmesinde kritik bir araç olmaya devam edecektir.