


Robot Operating System
Definition and Importance of ROS
- • ROS (Robot Operating System) is an open-source software platform used to develop robotic applications. ROS is not an actual operating system but functions like one, managing packages between different hardware components and software modules. ROS facilitates receiving data from sensors, processing this data, and controlling robots based on the processed data.
- • The standards of developed robotic systems are set by their manufacturers. Although robots perform similar tasks, each robot must adhere to the standards defined by its manufacturer and the software developed by the manufacturer. Due to the lack of a common standard among robot manufacturers, learning different brand robots becomes challenging. ROS eliminates this challenge by enabling the use of a standard structure independent of the manufacturer and developer. For example, each industrial robot brand has its unique programming syntax, and learning the programming syntax of each brand is required. In industrial robot brands that provide ROS Driver support, a common standard can be achieved by using the Moveit software developed for ROS. Through the Moveit software, trajectory planning algorithms can be developed for different robot brands using the same standard structure. Thus, ROS’s standardized structure allows projects to be developed with various robot brands.
Working Principle and Architecture of ROS
Communication of ROS Packages
- 1. Node: In ROS, independent programs performing different functions are called nodes. ROS enables the communication of packages through nodes, allowing different hardware components on the robot to send and receive data from each other. For instance, while one node receives images from a camera, another node can process these images. A different node can receive position, velocity, and acceleration data from motors, while another node can use this data to run the robot’s control algorithm. This ensures the software operates in a more modular structure.
- 2. Topic: Data exchange between nodes is done through topics. A node can send data to a topic, while another node can receive data from that topic.
- 3. Service: A node can request another node to perform a specific task through a service call. Services are typically used for one-time operations.
- 4. Message: Data packets transmitted between nodes. Each message has a specific structure and can contain different data types.
- 5. Bag File: In ROS, the file format used to record data from robot sensors for later analysis.
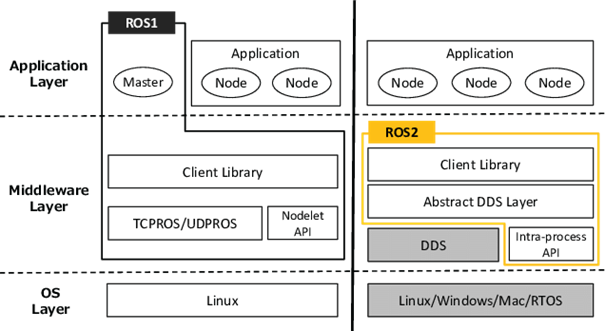
Differences Between ROS1 and ROS2 Architectures
ROS 2 was developed as the next version of ROS 1, offering real-time operations, better security, distributed systems, and more stable communication protocols. ROS 2 is particularly optimized for industrial applications and critical tasks. It was developed primarily to address the shortcomings and gaps of ROS 1. TCP/IP connection is used for package communication in the ROS architecture, while in ROS 2, DDS, commonly used for middleware in distributed systems, was added for communication.
- DDS:
-
- • ROS1: Relies on a central master node, ensuring communication between all other nodes. This prevents a single problem from disrupting the entire system.
- • ROS2: Uses a more modern, distributed communication model based on DDS (Data Distribution Service). This eliminates the need for a central node, making the system more reliable.
- • ROS1: Relies on a central master node, ensuring communication between all other nodes. This prevents a single problem from disrupting the entire system.
- Real-Time Support:
-
- • ROS1: Not designed for real-time applications and falls short in such cases.
- • ROS2: Supports real-time applications by offering low latency and precise timing control.
- • ROS1: Not designed for real-time applications and falls short in such cases.
- Operating System Support:
-
- • ROS1: Primarily optimized for the Linux operating system, with limited support for other platforms.
- • ROS2: Offers multi-platform support. While primarily running on Linux, it can also be used on other operating systems like Windows and macOS through virtualization technology.
- • ROS1: Primarily optimized for the Linux operating system, with limited support for other platforms.
- Security:
-
- • ROS1: Does not have built-in security support. Additional configurations and measures are required for security.
- • ROS2: Provides more secure communication by utilizing DDS’s built-in security features.
- • ROS1: Does not have built-in security support. Additional configurations and measures are required for security.
- API Changes:
-
- • ROS1: Contains older APIs and libraries with some shortcomings.
- • ROS2: Offers improved APIs and libraries compared to ROS1, but this can make the transition from ROS1 to ROS2 more challenging.
- • ROS1: Contains older APIs and libraries with some shortcomings.
- Community and Support:
-
- • ROS1: Has been around for a longer time and has a larger user base, providing more resources and support.
- • ROS2: Although newer, it has a rapidly growing community and is developed to meet more modern needs.
- • ROS1: Has been around for a longer time and has a larger user base, providing more resources and support.
ROS Ecosystem: Core Tools and Components
The ROS ecosystem offers a wide range of software packages for developing, testing, and deploying robotic projects. This ecosystem is designed to make robotic software development easier, faster, and more reliable.
A specific version of ROS comes with certain tools and libraries. Each ROS distribution comes with long-term support (LTS) and is optimized for different platforms.
For example: ROS Melodic, ROS Noetic, ROS 2 Foxy, ROS2 Humble.
- 1. RVIZ: A tool used to visualize sensor data and environmental information for robots. With RVIZ, real-time data from robots and sensors are visualized to create a 3D model. For example, data from a lidar scanner, images from a camera, and the position of the robot are visualized in 3D within the RVIZ environment.
- 2. GAZEBO: A powerful simulation tool used to model how robots move and interact in the physical world. It integrates with ROS, allowing software to be tested without a physical robot. GAZEBO models physical robot movements with its physics engine, sensor simulation, and 3D modeling support.
- 3. MoveIt: A ROS library that provides features like motion planning, kinematic calculation, collision avoidance, and singularity detection, primarily for robotic manipulators. It is highly useful for industrial robots.
- 4. rosbag: A tool in ROS used for recording and replaying data. It is especially useful for recording and analyzing sensor data. Rosbag files facilitate the transfer of recorded data.
- 5. tf: A library in ROS that allows transformation between different coordinate systems. It visualizes transformations between the robot’s joints, camera, sensors, and world coordinate system. For example, it is useful for calculating transformations between a robot’s arm, camera, and its position in the world.
- 6. rqt: A modular GUI tool for ROS. It combines the features of RVIZ, rosbag, and other tools to offer a user-friendly interface. rqt has many plugins, making it easier to analyze robotic systems.
- 7. Navigation Stack: A software library that enables mobile robots to map, localize, and plan paths. This package allows robots to move safely within their environment. It includes algorithms like AMCL (Adaptive Monte Carlo Localization) and Dijkstra.
These software libraries and packages form the core building blocks of the ROS ecosystem, playing a critical role in the fast, efficient, and modular prototyping of robotic systems.
ROS’s Functional Features and Applications
ROS is a platform used for developing, managing, and integrating robotic systems. The general tasks ROS offers enable robots to operate effectively and efficiently in various applications. These tasks cover a wide range, from robot motion to sensor data processing, autonomous behavior to data communication:
- 1. Motion Planning and Control:
-
- • Kinematic and Dynamic Calculations: ROS performs forward and inverse kinematic calculations to determine the positions of the robot’s joints and bodies. This allows the robot to accurately reach the target position with precise coordinates and angles.
- • Path Planning: Software packages like MoveIt calculate optimal paths for robots to reach a specific target while avoiding obstacles.
- • Real-Time Control: ROS2 provides real-time control over the robot’s motors and actuators. This allows the robot to perform precise movements and execute tasks accurately.
- 2. Sensor Data Processing and Perception:
-
- • Data Processing: ROS collects and processes data from various sensors such as LIDAR, cameras, radar, and IMU. This data forms the basis for robots to perceive their surroundings and make decisions.
- • Mapping: Algorithms like SLAM (Simultaneous Localization and Mapping) allow robots to map their environments while simultaneously determining their positions.
- • Object Recognition and Tracking: ROS integrates with image processing libraries like OpenCV to perform tasks such as object recognition, tracking, and classification. This enables robots to make autonomous decisions and interpret their surroundings.
- • Data Processing: ROS collects and processes data from various sensors such as LIDAR, cameras, radar, and IMU. This data forms the basis for robots to perceive their surroundings and make decisions.
- 3. Autonomous Navigation:
-
- • Localization: Algorithms like AMCL (Adaptive Monte Carlo Localization) allow robots to determine their positions on a known map.
- • Pathfinding: ROS helps robots find the most suitable path to reach their target while avoiding obstacles. This is especially important for autonomous mobile robots (AMR).
- • Movement in Dynamic Environments: ROS ensures robots move safely and efficiently in dynamic environments, such as those involving people and other moving objects.
- • Localization: Algorithms like AMCL (Adaptive Monte Carlo Localization) allow robots to determine their positions on a known map.
- 4. Inter-Robot Communication and Coordination:
-
- • Multi-Robot Systems: ROS can be configured to allow multiple robots to work together. These robots can share tasks and coordinate to accomplish more complex missions.
- • Data Sharing: ROS facilitates data sharing and collaboration between robots. For example, map data collected by one robot can be used by other robots.
- • Multi-Robot Systems: ROS can be configured to allow multiple robots to work together. These robots can share tasks and coordinate to accomplish more complex missions.
- 5. Simulation and Testing:
-
- • Physical Simulation: Tools like Gazebo simulate how robots will behave in the physical world. This allows software to be tested in a virtual environment before being deployed to a physical robot.
- • Testing Robot Models: ROS enables the testing of robot models and software in a simulation environment, making it possible to identify errors before physical robot tests are conducted.
- • Physical Simulation: Tools like Gazebo simulate how robots will behave in the physical world. This allows software to be tested in a virtual environment before being deployed to a physical robot.
- 6. Data Collection and Analysis:
-
- • Data Collection: ROS can record all data generated during a robot’s operation. This data can be analyzed to evaluate the system’s performance and identify potential improvements.
- • Real-Time Monitoring: ROS monitors and analyzes sensor data and the robot’s status in real-time. This allows developers to optimize the system and make real-time interventions.
- • Data Collection: ROS can record all data generated during a robot’s operation. This data can be analyzed to evaluate the system’s performance and identify potential improvements.
- 7. Artificial Intelligence and Machine Learning Integration:
-
- • Intelligent Decision-Making: ROS integrates artificial intelligence and machine learning algorithms to enable robots to make complex decisions. This is especially important for autonomous robots and advanced automation applications.
- • Learning Algorithms: With ROS, robots can learn from past experiences and work more efficiently in future tasks.
- • Intelligent Decision-Making: ROS integrates artificial intelligence and machine learning algorithms to enable robots to make complex decisions. This is especially important for autonomous robots and advanced automation applications.
- 8. Data Communication and Protocol Management:
-
- • Messaging System: ROS has a messaging system that facilitates communication between nodes. This makes it easier to share data and coordinate between different components of the robot.
- • Integration with Industrial Protocols: ROS can work with industrial communication protocols (e.g., CAN Bus, EtherCAT). This ensures ROS’s compatibility with industrial automation systems.
- • Messaging System: ROS has a messaging system that facilitates communication between nodes. This makes it easier to share data and coordinate between different components of the robot.
These general tasks enable ROS to be widely used in robotic systems. ROS plays a critical role in both research projects and industrial applications due to its flexible and modular structure.
Applications of ROS
ROS is a versatile platform used for developing robotic applications, with a wide range of uses in various industries, research areas, and academic studies. The main common applications of ROS include:
- 1. Mobile Robots:
-
- • Autonomous Navigation: ROS is used to enable mobile robots to map their environment, find paths, and move autonomously. This is common in applications like autonomous transport robots in logistics warehouses, autonomous cleaning robots, and autonomous vehicles used in agriculture.
- • Drones and Unmanned Aerial Vehicles (UAV): ROS is used for tasks such as flight control, navigation, obstacle detection, and mapping for drones. These applications are widely used in agriculture, logistics services, environmental monitoring, and disaster management.
- • Autonomous Navigation: ROS is used to enable mobile robots to map their environment, find paths, and move autonomously. This is common in applications like autonomous transport robots in logistics warehouses, autonomous cleaning robots, and autonomous vehicles used in agriculture.
- 2. Industrial Robots:
-
- • Robotic Manipulators: ROS is used for controlling industrial robot arms, planning trajectories, and coordinating them. It is used in fields like automotive manufacturing, electronics assembly, and packaging. ROS is also widely used for collaborative robots that work alongside humans. These robots are used on assembly lines, in quality control, and in precise manufacturing processes.
- 3. Agricultural Technologies:
-
- • Autonomous Agricultural Machines: ROS is widely used in autonomous agricultural machines used for tasks such as planting, harvesting, and plant care. These machines coordinate their movements within the field through GPS and various sensors.
- • Agricultural Robots: Robots are developed using ROS for tasks such as plant analysis, weed detection, and pest control.
- • Autonomous Agricultural Machines: ROS is widely used in autonomous agricultural machines used for tasks such as planting, harvesting, and plant care. These machines coordinate their movements within the field through GPS and various sensors.
- 4. Defense and Security:
-
- • Unmanned Ground Vehicles (UGV): ROS is used in the development of unmanned ground vehicles used in military tasks like reconnaissance, mine clearance, and logistics support.
- • Security Robots: ROS is commonly used in quadrupedal robots for tasks like security monitoring, patrolling, and hazard detection.
- • Unmanned Ground Vehicles (UGV): ROS is used in the development of unmanned ground vehicles used in military tasks like reconnaissance, mine clearance, and logistics support.
- 5. Autonomous Vehicles:
-
- • Autonomous Vehicles: ROS is used in the development of autonomous driving systems. ROS tools are commonly preferred for processing sensor data, pathfinding, obstacle detection, and decision-making processes.
- • Logistics Robots: ROS is used for autonomous vehicles and robots used in logistics warehouses. These vehicles autonomously perform storage and transportation operations.
- • Autonomous Vehicles: ROS is used in the development of autonomous driving systems. ROS tools are commonly preferred for processing sensor data, pathfinding, obstacle detection, and decision-making processes.
- 6. Submarine and Surface Robots:
-
- • Autonomous Marine Vehicles (AUV/ASV): ROS is used in the control of autonomous marine vehicles used for underwater and surface research. These vehicles perform tasks like ocean research, water quality monitoring, and underwater mapping.
- • Underwater Robots: ROS enables the control of robots for tasks like underwater inspection, rescue operations, and underwater structure maintenance.
- • Autonomous Marine Vehicles (AUV/ASV): ROS is used in the control of autonomous marine vehicles used for underwater and surface research. These vehicles perform tasks like ocean research, water quality monitoring, and underwater mapping.
- 7. Research and Academic Studies:
-
- • Robotic Research: ROS is widely used for robotic research in academic institutions. This includes developing new algorithms, testing robotic control systems, and running simulations. In theoretical studies developed for academia, collaborative robots are especially frequently used. Open-source availability provides a significant advantage in this regard.
The versatility of ROS, its ability to integrate with different sensors and actuators, and the broad support from the community make it a powerful tool for anyone developing robotic projects.
Advantages of Using ROS:
ROS has revolutionized the robotics field, speeding up robot development processes and making it accessible to everyone easily and for free. ROS provides certain criteria:
- 1. Standardization and Modularity:
ROS provides a standard platform for robotic software, allowing different robots and components to work together. This facilitates collaboration between different robot groups and brands. Because ROS has a modular structure, developers can easily add and remove different components. This provides flexibility and scalability, allowing the development of any robotic system, from small prototypes to large industrial robots.
- 2. Open Source and Community Support:
The open-source nature of ROS has enabled the formation of a large user and developer community worldwide. This community constantly offers new libraries, tools, and updates, ensuring the continuous development of ROS. Having a broad community allows developers to quickly find solutions to their problems and access the most error-free applications. Additionally, new research and technologies can be published using ROS. The driver support for hardware developed for ROS is becoming increasingly widespread.
- 3. Wide Use in Industry:
ROS enables the rapid prototyping of robotic systems. This is especially advantageous for startups and R&D-focused companies because they can quickly test new ideas and bring them to market. At the same time, ROS is widely used in the control of industrial robots. ROS’s role is increasing in concepts like Industry 4.0 and smart factories. Industrial robots are becoming smarter and more efficient thanks to ROS’s flexibility and extensive tool support.
- 4. Simulation and Digital Twin Technology:
ROS offers both live and simulation environments with tools like Gazebo and RVIZ. This allows industrial processes to be tested and optimized in a virtual environment. Thanks to digital twin technology, it becomes possible to identify problems before the project is realized, providing an advantage in expensive hardware costs.
Importance and Future of ROS in Robotics
-
- • ROS will play an even more critical role in the future for autonomous vehicles, industrial automation, and unmanned systems. Artificial intelligence (AI) and machine learning algorithms, when integrated with ROS, allow robots to better understand their environment and autonomously complete more complex tasks. This integration will significantly contribute to the development of smarter and more capable robots in the future.
- • ROS’s integration with cloud-based software enhances the capabilities of robots. Cloud-based systems contribute to increasing the capacity of hardware in cases where multiple robots are used, allowing intensive computations to be performed.
- • In the future, ROS’s role in autonomous systems such as autonomous vehicles, drones, and underwater robots will increase. ROS will play a critical role in ensuring these systems can interact with each other and with humans safely and effectively.
- • ROS plays a critical role in the formation of a global robotic ecosystem. Its open-source nature allows companies, academics, and independent developers to collaborate, facilitating faster progress.
- • ROS’s standards and tools enable different robotic platforms and components to work together seamlessly. This can lead to the development of more complex and integrated robotic systems in the future.
- • With its importance in robotics, ROS not only shapes today’s technologies but also directs the future of the robotic world. Particularly with the development of ROS 2 and its integration with advanced technologies like AI and cloud computing, ROS’s usage will become even more widespread in the future. ROS will continue to be a critical tool in making robotic systems smarter, more accessible, and more widespread.
- • ROS will play an even more critical role in the future for autonomous vehicles, industrial automation, and unmanned systems. Artificial intelligence (AI) and machine learning algorithms, when integrated with ROS, allow robots to better understand their environment and autonomously complete more complex tasks. This integration will significantly contribute to the development of smarter and more capable robots in the future.